今日记录
参考网页:
网络配置
将Unitree Go 2机器人与路由器通过有线方式配置局域网,因为机器需要以下三个固定IP
192.168.123.18 #拓展坞PC IP
192.168.123.20 #雷达IP
192.168.123.161 #运控PC IP
故在路由器控制台将网段更改至
192.168.123.xxx
ping成功通过
拓展坞模块调试

宇树科技官方在2026-04-01发布了新版本拓展坞的固件
访问拓展坞模块 <192.168.123.18> 上传了新拓展坞固件包进行更新
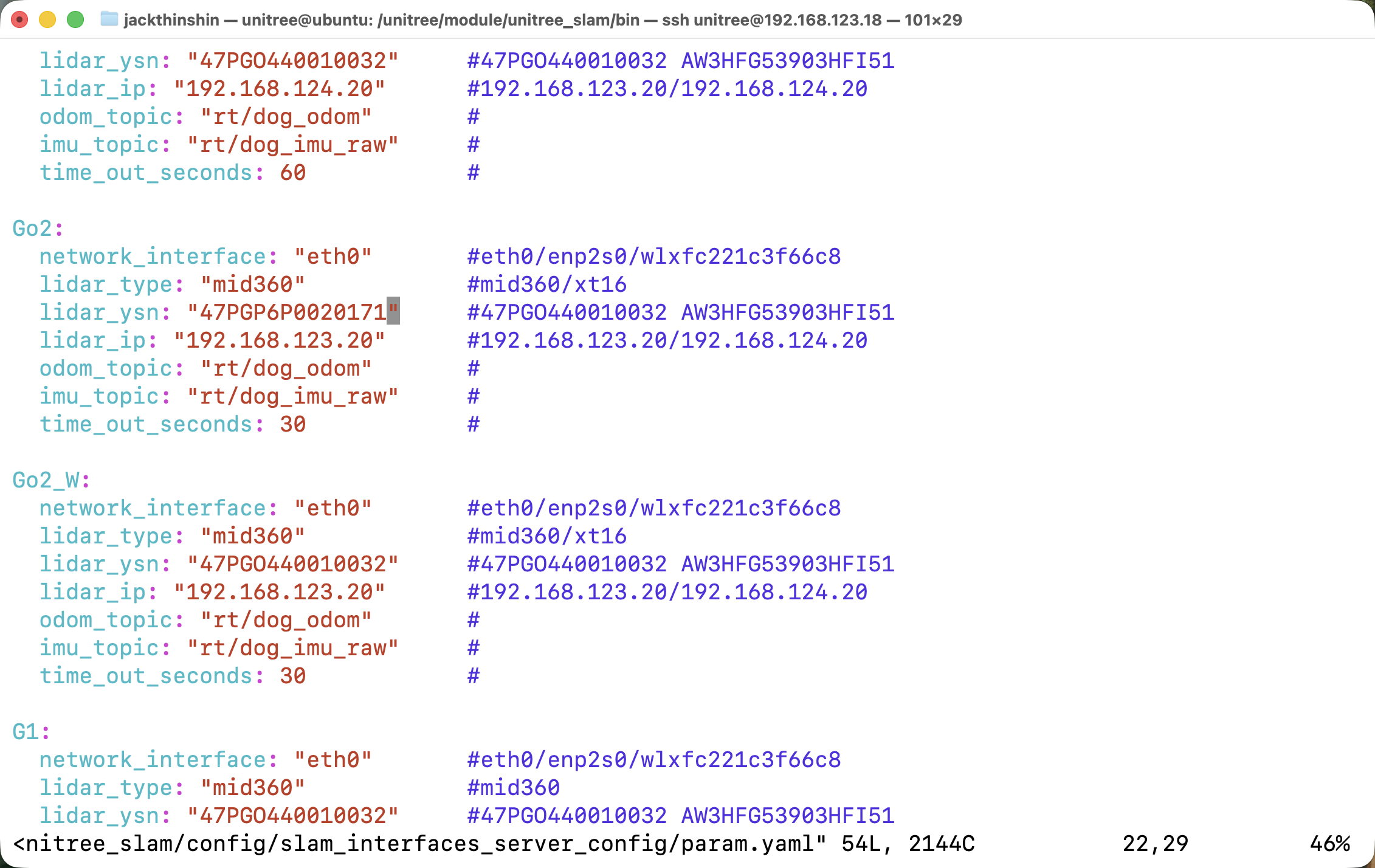
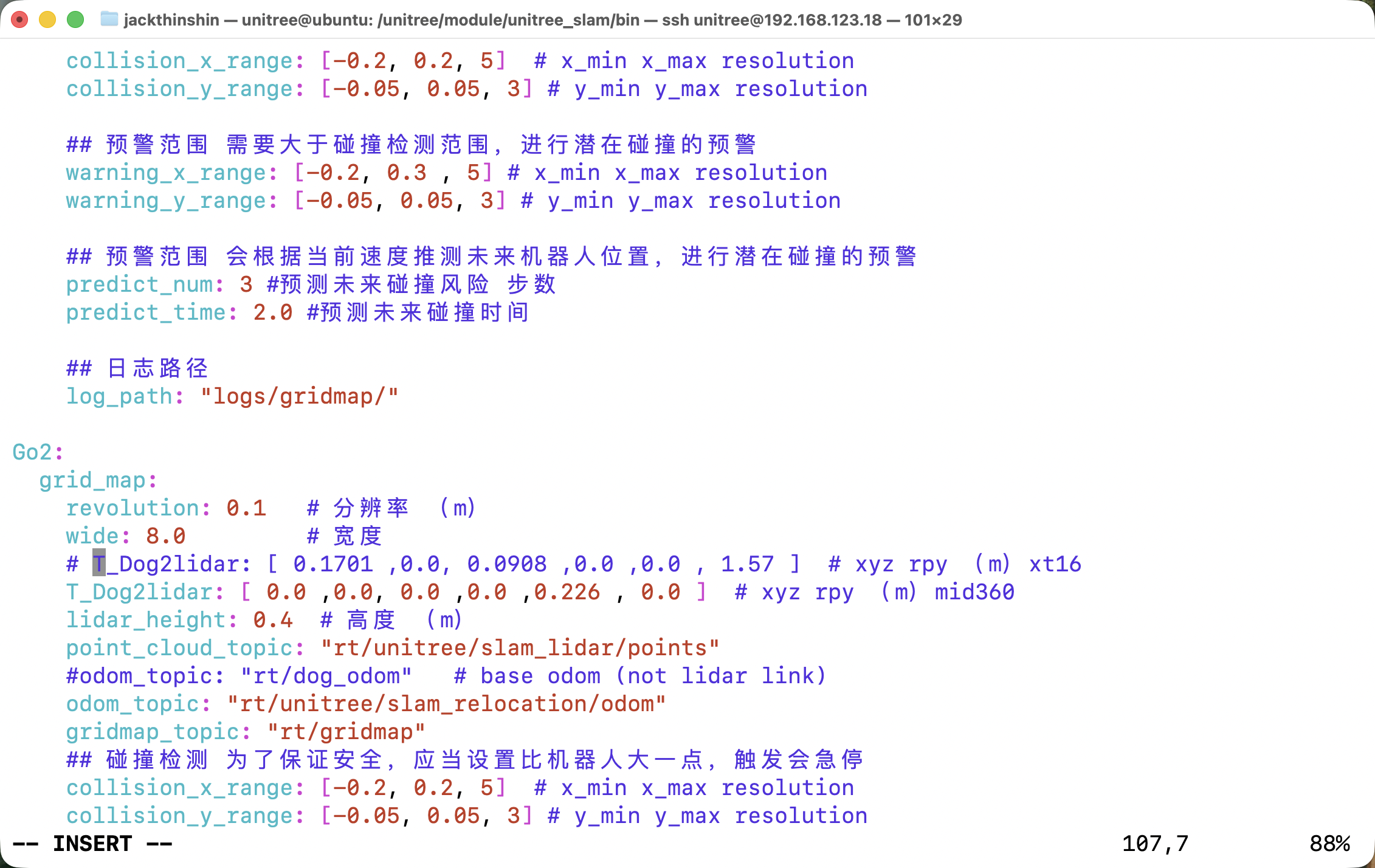
通过ssh连接,配置好雷达类型、YSN参数以及雷达的外参数(即坐标轴相对偏移量)
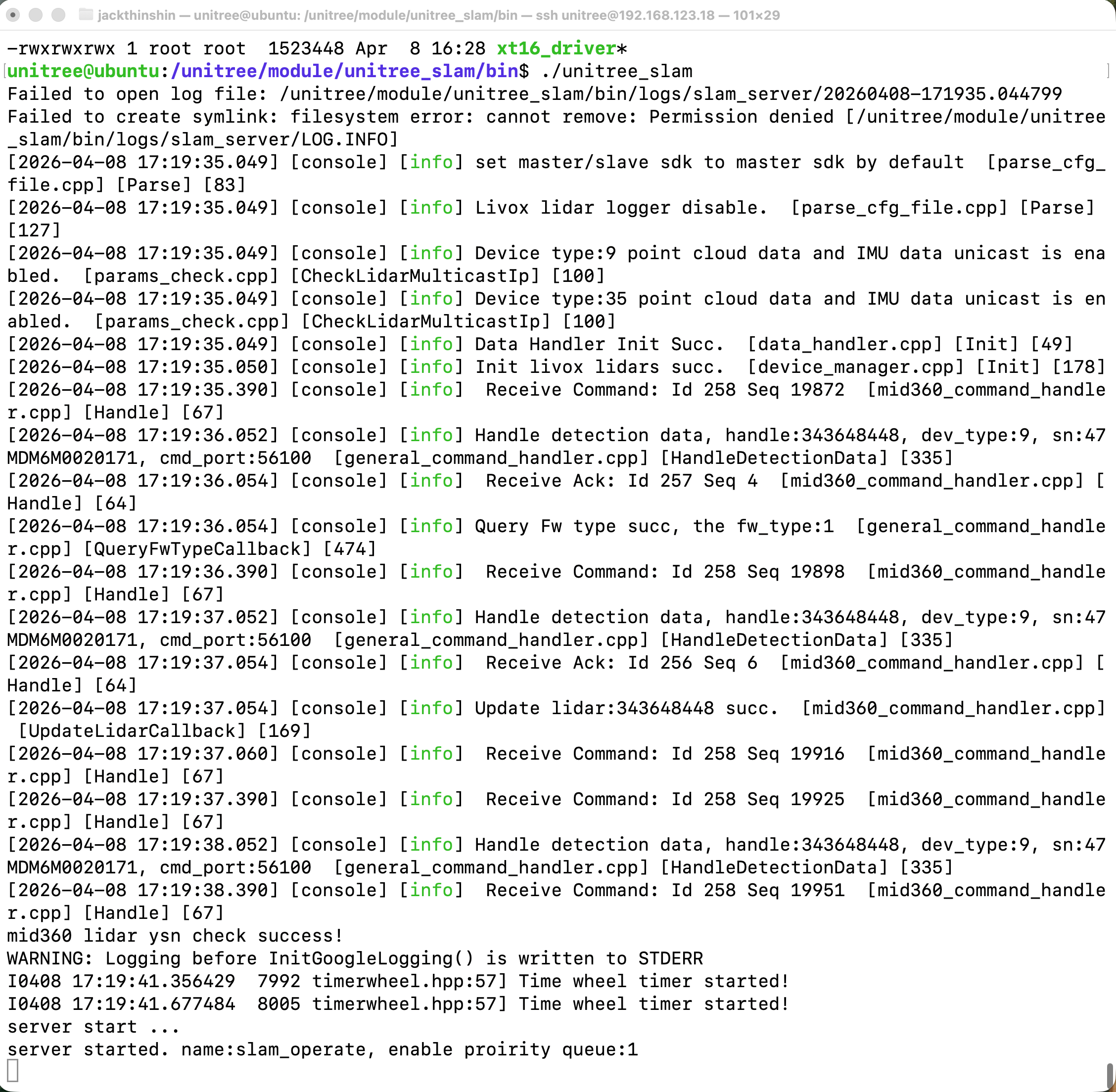
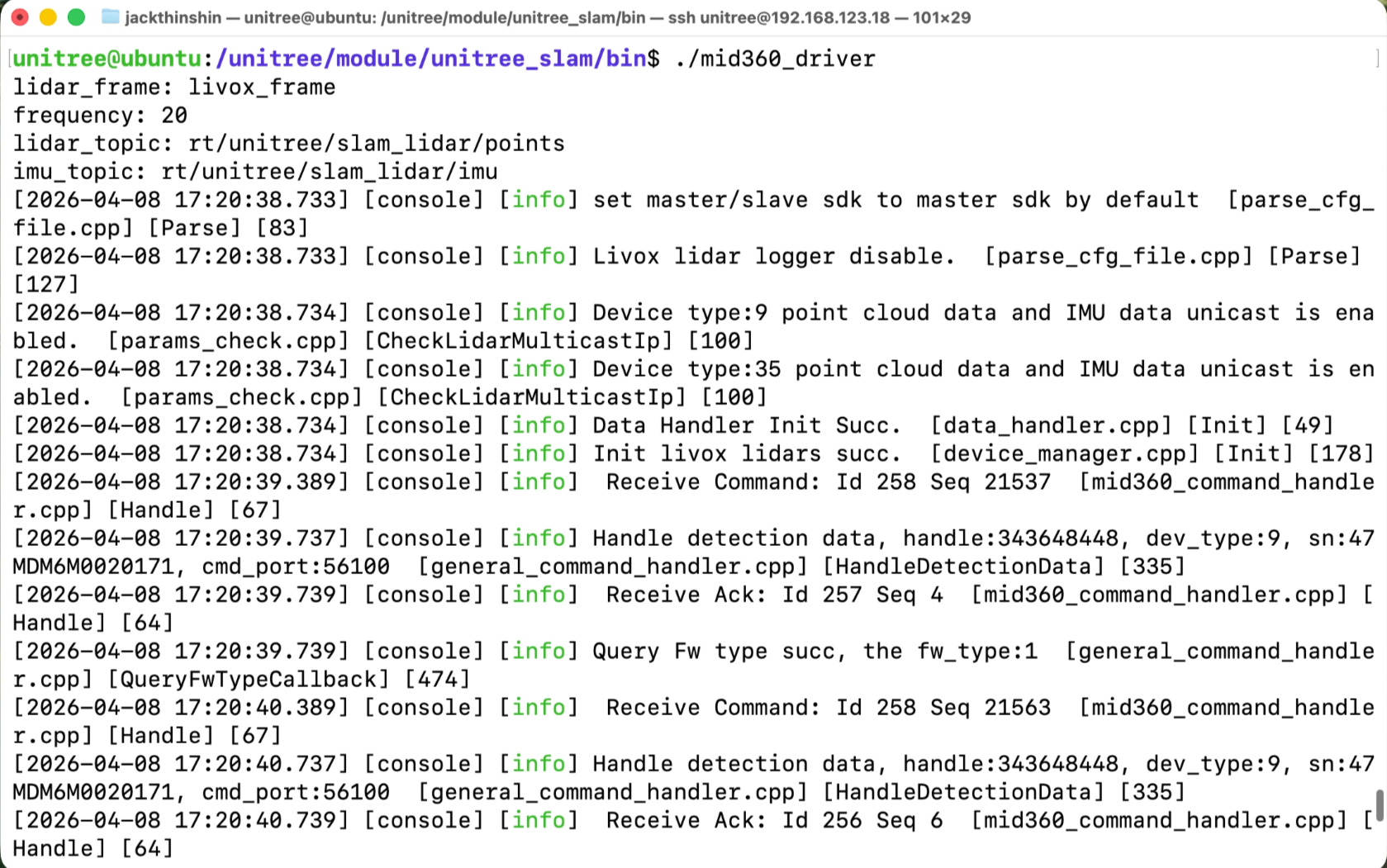
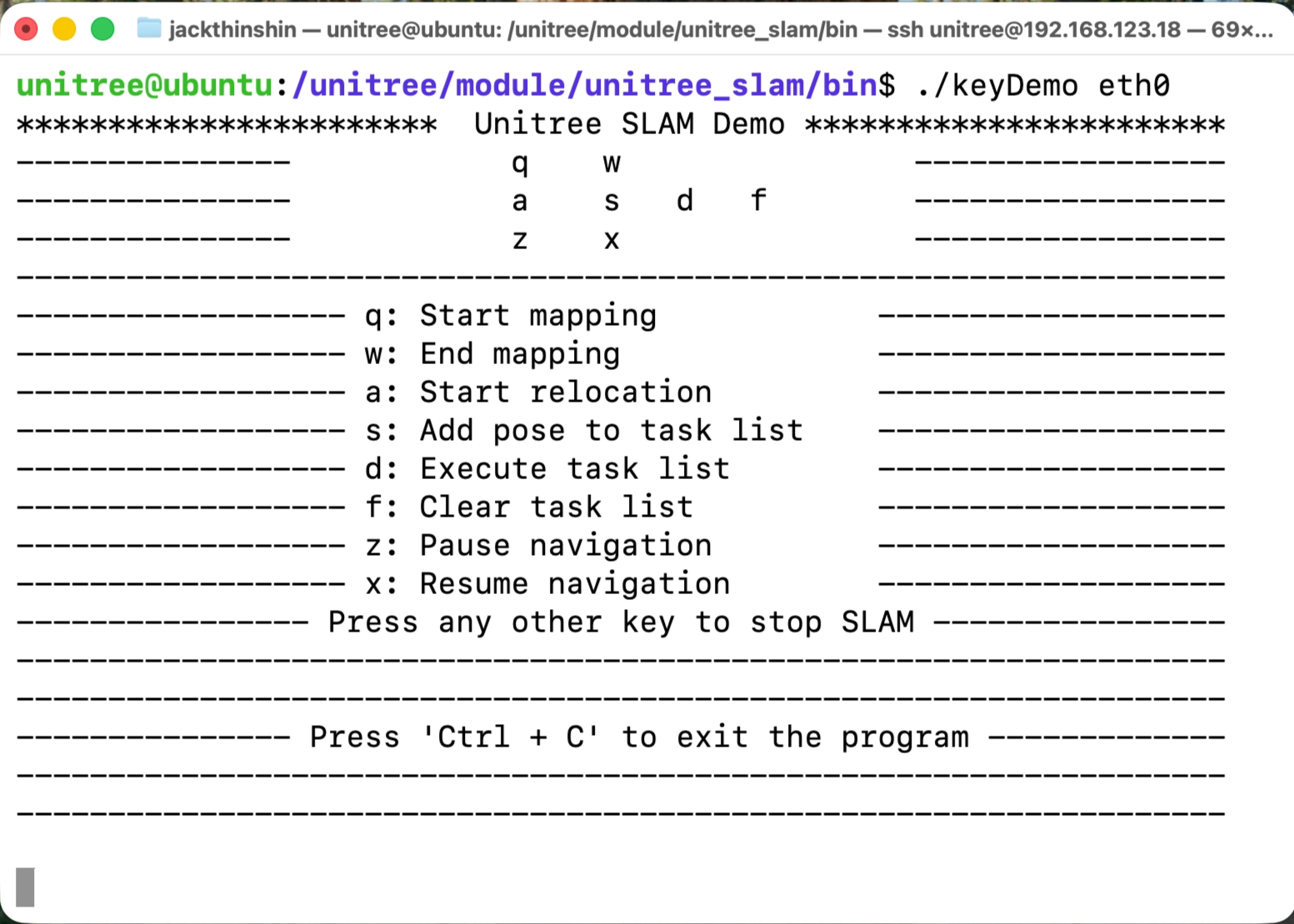
成功运行官方文档中SLAM导航服务接口的功能测试参考例程
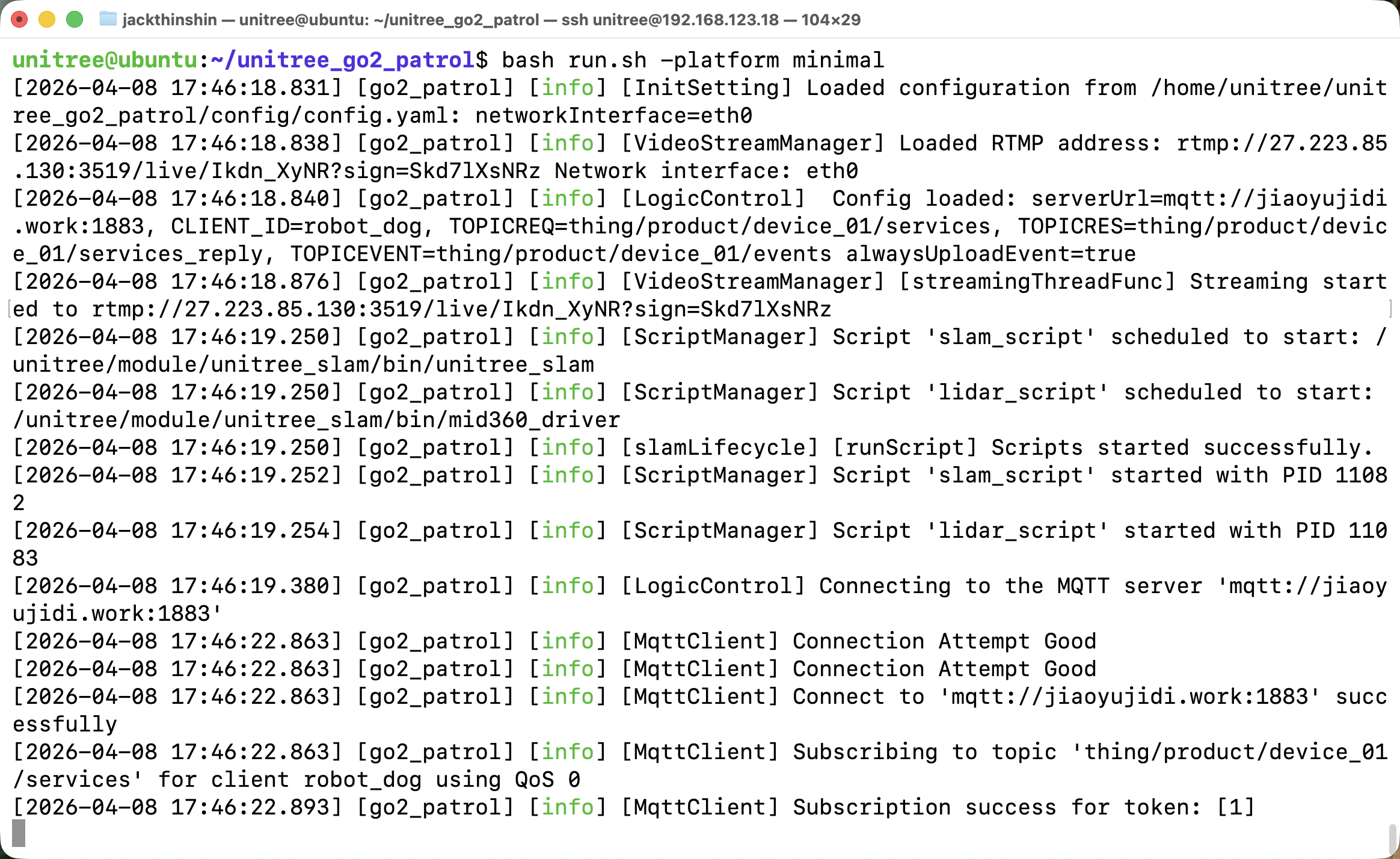
将巡检项目的代码 <unitree_go2_patrol-master.zip>
通过scp传到机器人拓展坞模块重新编译,并且成功运行
现存问题:
- Go 2机器电池问题——已联系返修

后续安排
基本的配置调试已做好,接下来先进行代码侧的开发,学习MQTT协议、SLAM等相关内容